⚡️ QuickStart
1. Map Matching Example
1.1. install gotrackit
Installation tutorial see:🚀 How to use
1.2. data download
Download sample data from GitHub repository:QuickStart-Match-1
1.3. Match code 1 - non-sparse gps data
1import pandas as pd
2import geopandas as gpd
3from gotrackit.map.Net import Net
4from gotrackit.MapMatch import MapMatch
5from gotrackit.gps.Trajectory import TrajectoryPoints
6
7if __name__ == '__main__':
8
9 # read gps data
10 gps_df = pd.read_csv(r'./data/input/QuickStart-Match-1/example_gps.csv')
11
12 # Use GPS data to build TrajectoryPoints and clean the data
13 # Whether this step is necessary depends on the actual situation
14 tp = TrajectoryPoints(gps_points_df=gps_df, plain_crs='EPSG:32649')
15 tp.lower_frequency(lower_n=2).kf_smooth(o_deviation=0.3) # 由于样例数据定位频率高且有一定的误差,因此先做间隔采样然后执行滤波平滑
16 gps_df = tp.trajectory_data(_type='df')
17
18 # Read the road network data and build the Net class and initialize it
19 link = gpd.read_file(r'./data/input/net/xian/modifiedConn_link.shp')
20 node = gpd.read_file(r'./data/input/net/xian/modifiedConn_node.shp')
21 my_net = Net(link_gdf=link, node_gdf=node, not_conn_cost=1200)
22 my_net.init_net() # net初始化
23
24 # Build a matching class
25 # Specify the HTML visualization file to be output
26 # Specify the project flag character flag_name='general_sample', which can be customized by the user
27 # The values of the gps data time column are all in the form of 2022-05-12 16:27:46, so the specified time column format is '%Y-%m-%d %H:%M:%S'
28 # Regarding the determination of gps_buffer, the road network and gps data need to be visualized together using gis software to roughly determine the distance between GPS data and candidate sections
29 mpm = MapMatch(net=my_net, gps_buffer=120, flag_name='general_sample', time_format='%Y-%m-%d %H:%M:%S',
30 use_heading_inf=True, omitted_l=6.0, export_html=True, del_dwell=False,
31 out_fldr=r'./data/output/match_visualization/QuickStart-Match-1', dense_gps=False,
32 gps_radius=20.0)
33
34 # Execute matching
35 # The first result returned is the matching result table
36 # The second is the information about the agent that issued the warning ({agent_id1: pd.DataFrame(), agent_id2: pd.DataFrame()...})
37 # The third is the ID list of the agent that failed to match (the number of GPS points after preprocessing (or raw data) is less than 2)
38 match_res, warn_info, error_info = mpm.execute(gps_df=gps_df)
39 match_res.to_csv(fr'./data/output/match_visualization/QuickStart-Match-1/general_match_res.csv',
40 encoding='utf_8_sig', index=False)
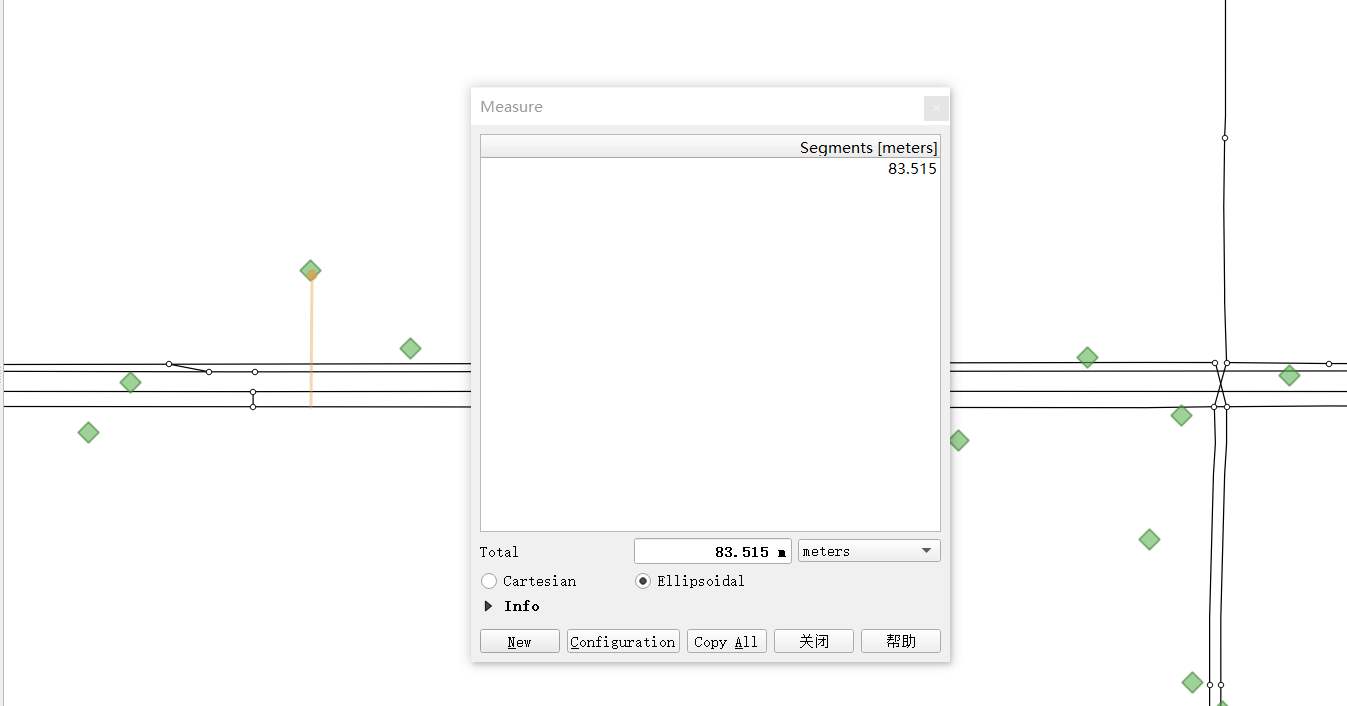
How to determine gps_buffer is related to the size of the GPS positioning error. As shown in the figure below, we visualize the GPS data and the road network together in QGIS

It can be seen that the positioning frequency of GPS points is not low, and the positioning point is not far from the road, about 85 meters. In order to ensure that all GPS points can be associated with the candidate road sections, it is more appropriate to take gps_buffer=120 meters
1.4. Match code 2 - sparse gps data
1import pandas as pd
2import geopandas as gpd
3from gotrackit.map.Net import Net
4from gotrackit.MapMatch import MapMatch
5from gotrackit.gps.Trajectory import TrajectoryPoints
6
7
8if __name__ == '__main__':
9 # read gps data
10 gps_df = pd.read_csv(r'./data/input/QuickStart-Match-1/example_sparse_gps.csv')
11
12 # Use GPS data to construct TrajectoryPoints. Whether this step is necessary depends on the actual situation.
13 tp = TrajectoryPoints(gps_points_df=gps_df, plain_crs='EPSG:32649')
14 tp.dense(dense_interval=120) # 由于样例数据是稀疏定位数据,我们在匹配前进行增密处理
15 gps_df = tp.trajectory_data(_type='df')
16 tp.export_html(out_fldr=r'./data/output/match_visualization/QuickStart-Match-1') # 输出增密前后的轨迹对比
17
18 # Read the road network data and build the Net class and initialize it
19 link = gpd.read_file(r'./data/input/net/xian/modifiedConn_link.shp')
20 node = gpd.read_file(r'./data/input/net/xian/modifiedConn_node.shp')
21 my_net = Net(link_gdf=link, node_gdf=node, not_conn_cost=1200)
22 my_net.init_net() # net初始化
23
24 # Since most of the track points are densified points, we need to increase gps_buffer to ensure that the track points are associated with the road segments
25 # Since we have already densified the GPS data in advance, we do not need to use the densification in MapMatch - dense_gps=False
26 mpm = MapMatch(net=my_net, gps_buffer=700, top_k=20, flag_name='sparse_sample',
27 export_html=True, time_format='%Y-%m-%d %H:%M:%S',
28 out_fldr=r'./data/output/match_visualization/QuickStart-Match-1', dense_gps=False,
29 gps_radius=15.0)
30
31 # Execute matching
32 # The first result returned is the matching result table
33 # The second is the information about the agent that issued the warning ({agent_id1: pd.DataFrame(), agent_id2: pd.DataFrame()...})
34 # The third is the ID list of the agent that failed to match (the number of GPS points after preprocessing (or raw data) is less than 2)
35 match_res, warn_info, error_info = mpm.execute(gps_df=gps_df)
36 match_res.to_csv(fr'./data/output/match_visualization/QuickStart-Match-1/general_match_res.csv',
37 encoding='utf_8_sig', index=False)
As shown in the figure below, we can see that after the GPS points are densified, the densified points are far away from the candidate sections, about 350 meters (the blue points are the source data points, and the red points are the densified points)
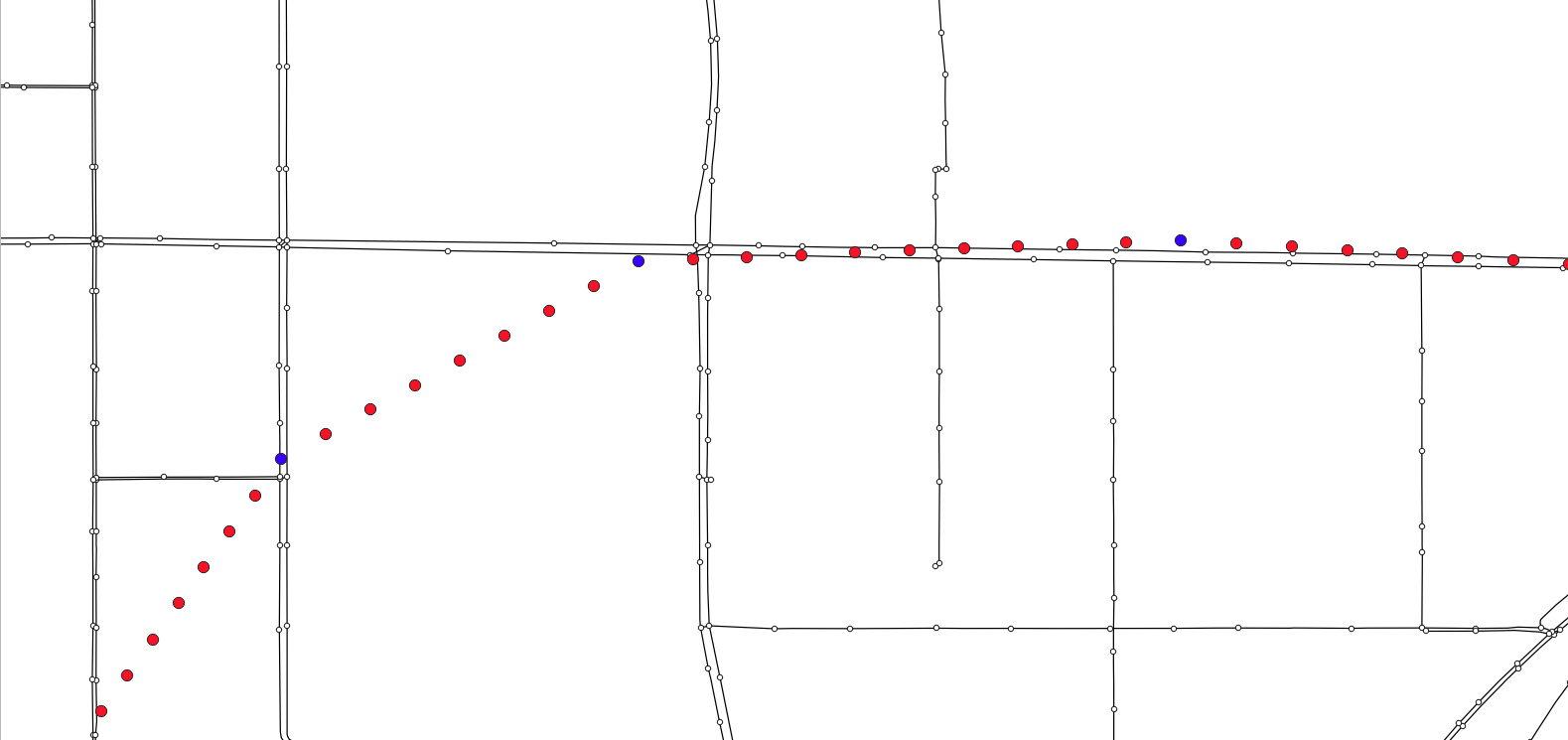
In order to ensure that all densification points can be associated with candidate sections, we consider more redundancy and take the values of gps_buffer=700 and top_k=20, that is, the nearest 20 sections within 700 meters of each GPS point are selected as candidate sections.

1.5. Result output and visualization
1.5.1. Comparison and visualization of trajectory before and after preprocessing
Open the file output by the tp.export_html function and view the track points before and after processing as shown in the following figure (blue: source data; yellow: processed data)
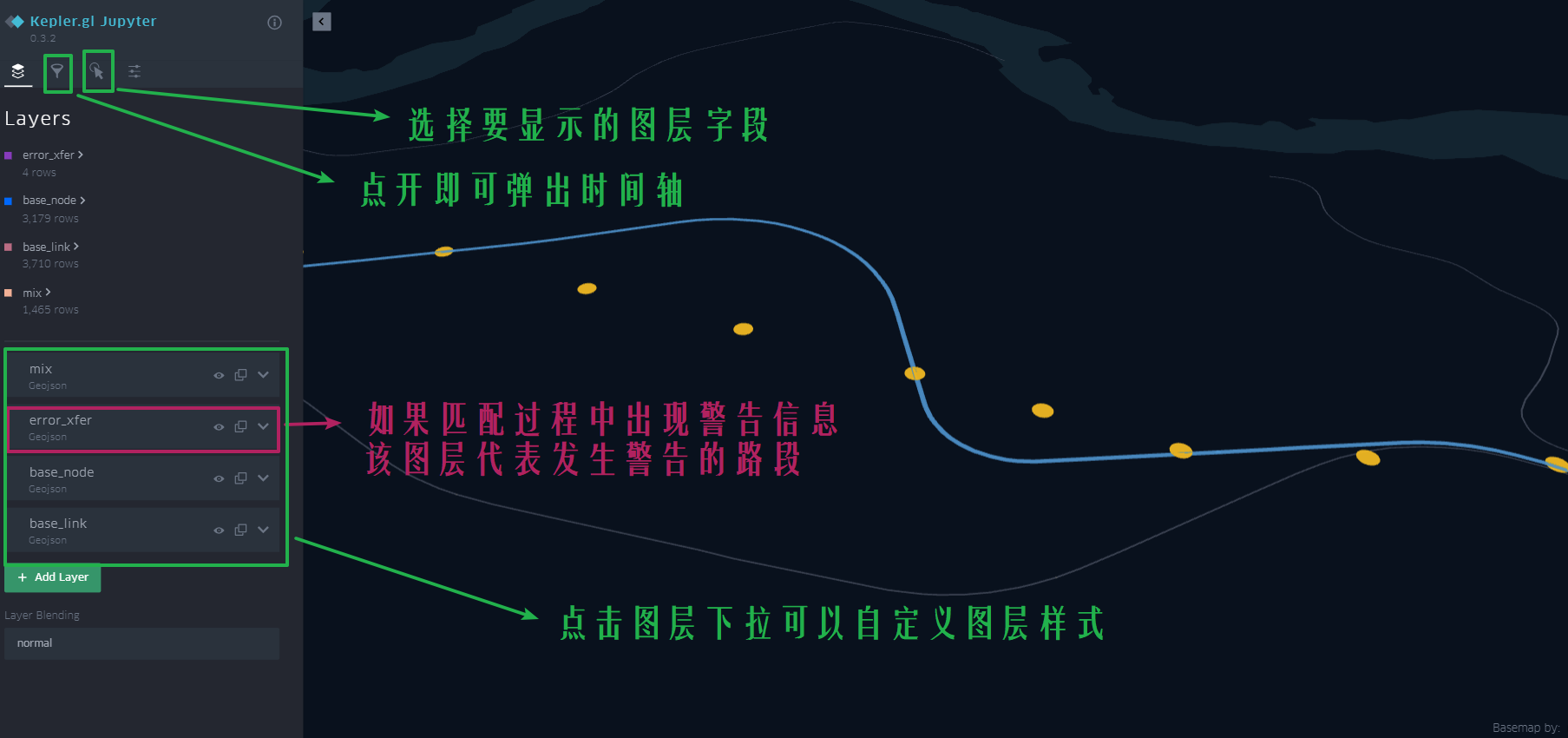
1.5.2. Matching result visualization
The above examples are just a brief introduction. Please read carefully for more features and explorations: 🚀 How to use